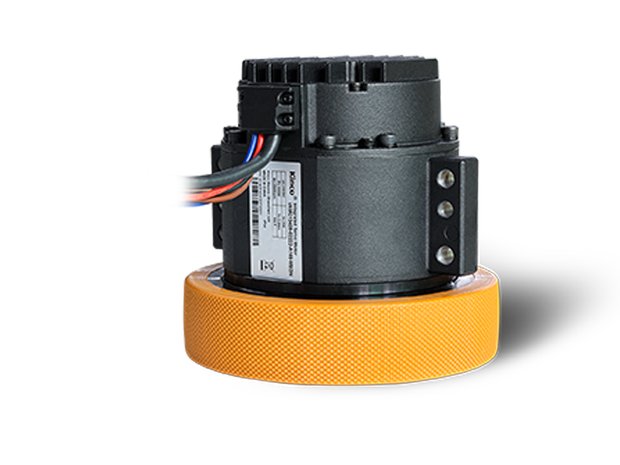
Driver, motor, reducer, and wheel integrated in a compact structure that facilitates vehicle downsizing;
Simple, convenient, and high accuracy rack mounting, improving controlling accuracy;
High reliability: Resistant to nickel-contacts and improves the stability and reliability of the entire system;
Compatible with other Kinco standard products, and they can be switched seamlessly;
A single supplier of integrated products is conducive to product maintenance and reduces supply chain and after-sales costs.
50kg~2T Load varioustypes of mobile robots
| iWMC Model Parameters | Rated Linear Speed(m/s) | Max Linear Speed(m/s) | Rated Torque Tn(Nm) | Peak Torque Tn(Nm) | Tire Diameter(mm) | Tire Width(mm) | Tire Material | Tire Hardness Rating | Max radial force N | Max axial force N |
| iWMC05606-00450-A150-M■DT-L | 3.9 | 5.2 | 3.6 | 10.9 | 150 | 40 | Polyurethane | 73A | 1500 | 280 |
| iWMC05606-00450-A150-M■DT-R | ||||||||||
| iWMC05606-00850-A150-M■DT-L | 3.9 | 5.2 | 7.2 | 21.7 | 150 | 40 | Polyurethane | 73A | 1500 | 280 |
| iWMC05606-00850-A150-M■DT-R | ||||||||||
| iWMC05710-01230-A130-M■DT | 2 | 2.3 | 12 | 36.1 | 130 | 35 | Polyurethane | 85A± 2 | 2500 | 500 |
| iWMC05710-01230-A150-M■DT | 2.3 | 2.7 | 12 | 36.1 | 150 | 35 | 85A± 2 | 2500 | 500 | |
| iWMC05710-01230-A165-M■DT | 2.59 | 3 | 12 | 36.1 | 165 | 35 | Polyurethane | 85A± 2 | 2500 | 500 |
| iWMC10409-02222-A165-M■DT | 1.9 | 2.2 | 22 | 66 | 165 | 39.5 | 85A | 3000 | 1000 | |
| iWMC10409-02222-A165-M■DR | Polyurethane | |||||||||
| iWMC10411-04023-A180-M■DT | 2.14 | 2.48 | 40 | 99 | 180 | 50 | 90A | 7000 | 1500 | |
| iWMC10411-04023-A180-M■DR | Polyurethane | |||||||||
| iWMC10415-05417-A180-M■DT | 1.57 | 1.82 | 54 | 150 | 180 | 50 | 93A±2 | 7000 | 1500 | |
| iWMC10415-05417-A180-M■DR | Polyurethane | |||||||||
| iWMC10420-07512-A180-M■DT | 1.18 | 1.37 | 75 | 200 | 180 | 50 | 93A±2 | 7000 | 1500 | |
| Note: ■ = A : Without brake B : With brake | ||||||||||
【Catalog】i-Kinco Integrated Series
2025-11-18© Kinco Electric (Shenzhen) Ltd.